The Fukushima Daiichi Nuclear Power Plant, located on the eastern coast of Japan, gained worldwide attention following the devastating earthquake and tsunami that struck on March 11, 2011. The natural disasters caused a series of meltdowns, hydrogen explosions, and releases of radioactive materials, leading to one of the worst nuclear accidents in history. Operated by the Tokyo Electric Power Company (TEPCO), Fukushima Daiichi faced immense challenges in containing and mitigating the disaster’s aftermath. The incident prompted widespread evacuations, environmental contamination, and concerns about nuclear safety worldwide. Despite ongoing cleanup efforts, the Fukushima Daiichi plant remains a symbol of the risks associated with nuclear energy and the importance of stringent safety measures in the industry.

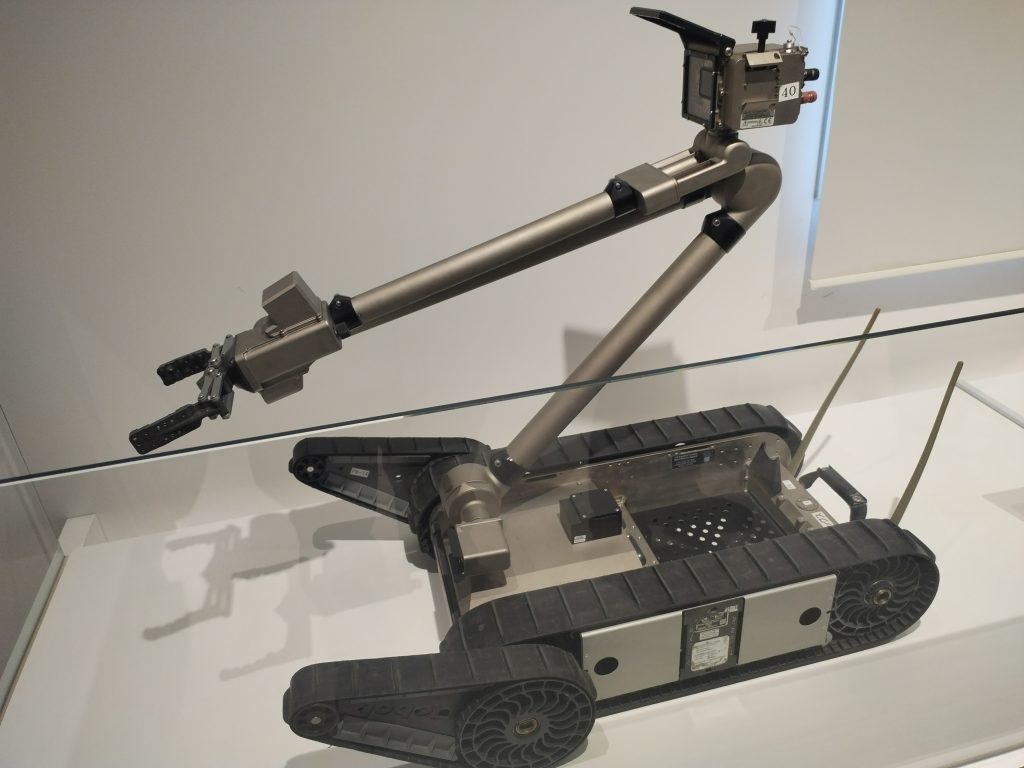
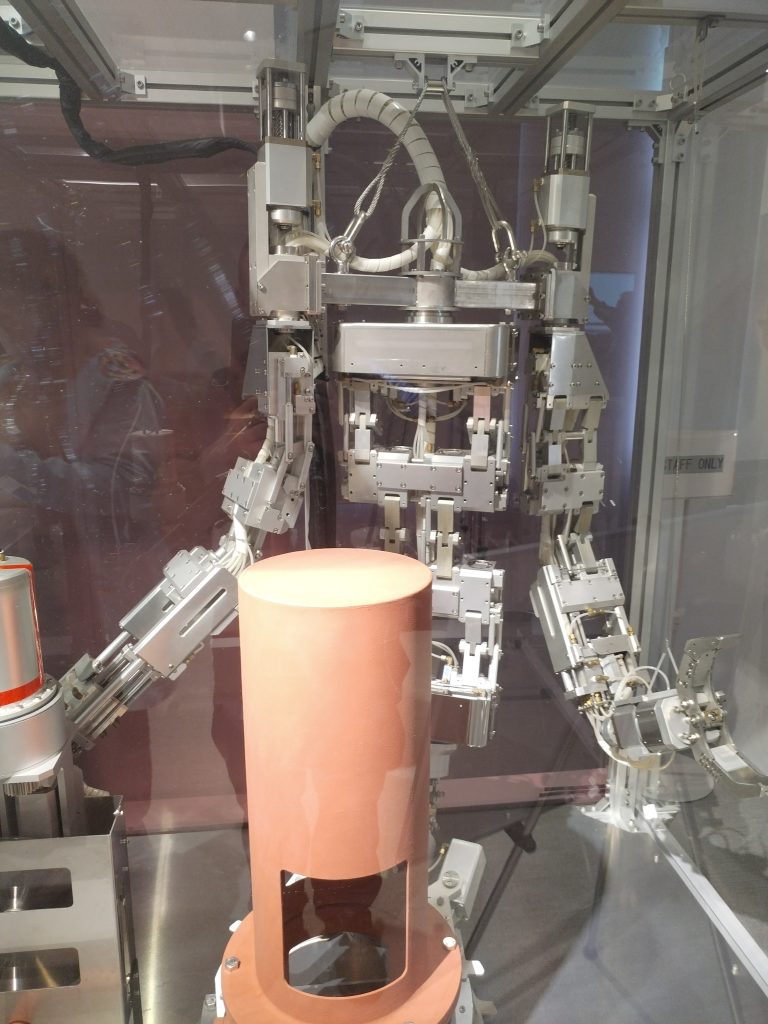
Decontamination robots played a critical role in the cleanup efforts following the Fukushima Daiichi nuclear disaster in 2011. These robots were specifically designed to navigate highly radioactive environments within the reactor buildings, where human access was extremely hazardous. Equipped with advanced sensors, cameras, and manipulator arms, these robots could assess radiation levels, gather data on structural integrity, and perform various decontamination tasks such as removing debris and repairing equipment. Additionally, some robots were capable of accessing confined spaces and areas with high levels of radiation that were otherwise inaccessible to humans. Despite facing challenges such as limited battery life and navigation difficulties, decontamination robots significantly aided in the mitigation of the disaster’s aftermath by enabling safer and more efficient cleanup operations. Their development and deployment underscored the importance of robotics technology in responding to nuclear emergencies and enhancing worker safety in hazardous environments.